人工服务热线
工作日 9:00 - 18:00
售前咨询:400-107-8298 转1
售后服务:400-107-8298 转2

诺亦腾微信服务号
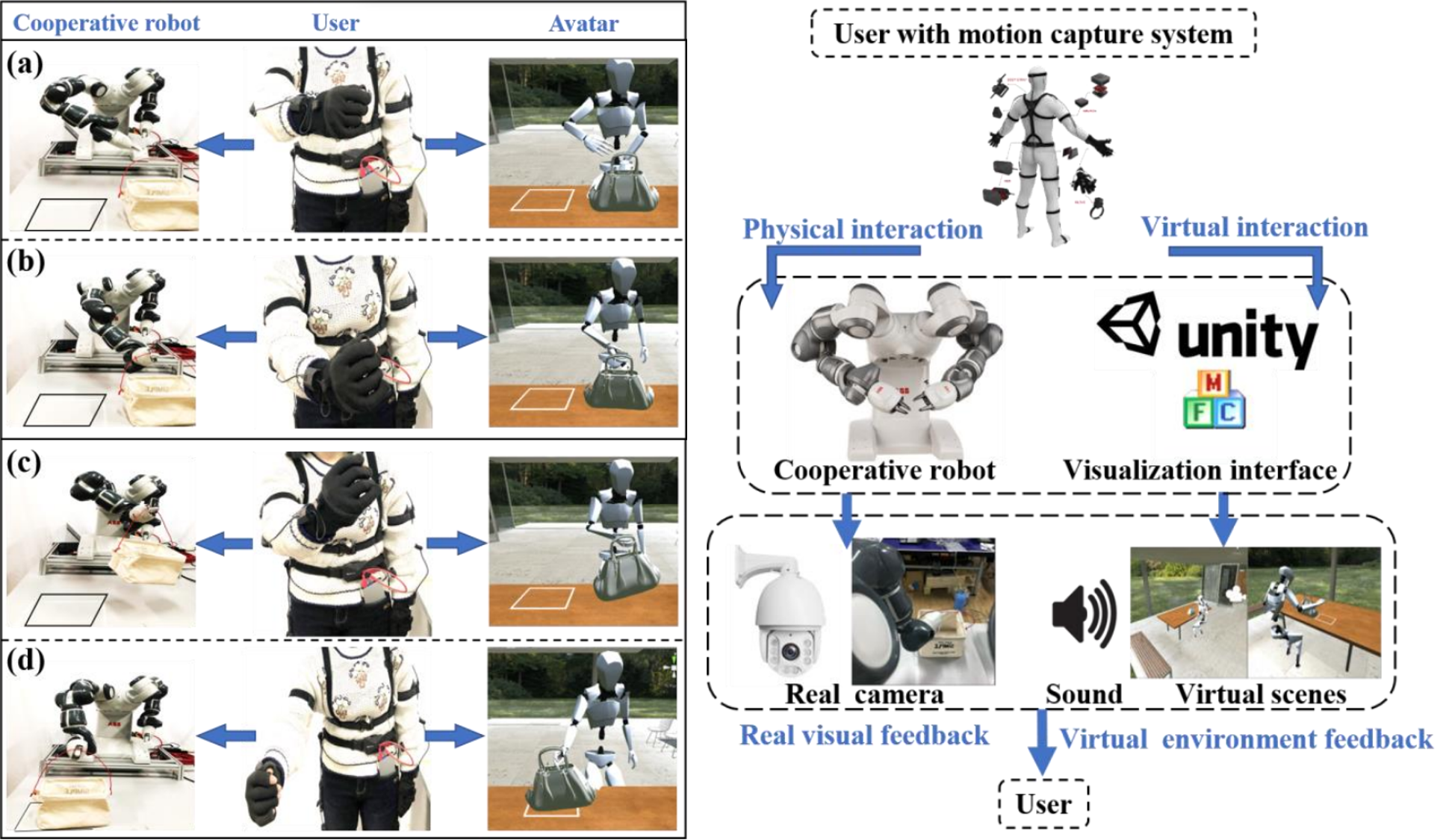
01 动捕技术在遥操作机器人的应用
浙江大学,国防科技大学
Huiying Zhou, Liu Yang, Honghao Lv, Kang Yi, Huayong Yang, Geng Yang
遥操作机器人系统(Teleoperation Robot System)已在太空探索、医疗保健等多个领域辅助甚至替代人类工作。遥操作系统的交互设计要使机器人准确反映人类真实操作意图。为此,本文作者采用诺亦腾PN惯性动捕设备,提出一种实时同步的人-机器人-虚拟交互系统(human-robot-virtuality interaction system),将物理交互和虚拟交互相结合,实现直观沉浸的交互体验。
操作者的动作数据由诺亦腾PN实时获取,并传输至机器人,使机器人同步跟随人类动作。同时,操作者可以通过VR头显观察操作反馈。经作者设置的特定任务检验,该交互系统的任务成功率达到80%,任务操作时间缩短至约20秒,显著提高了遥操作任务的效率和准确性。
原文链接:https://ieeexplore.ieee.org/document/8868447
02 生物力学模型与数字人体模型结合
德国,埃尔朗根-纽伦堡大学
The Federal Institute for Occupational Safety and Health (BAuA)
数字人体模型(Digital Human Model, DHM)关注人体外部的测量学数据,以评估工作场所人体工学设计,但难以对工作场所微调实现准确评估,而生物力学模型(Biomechanical Models)关注人体内部骨骼、肌肉和关节的力学负荷等数据,以分析动作或姿势对人体影响,可补充DHM短板。本文作者在生物力学模型软件AnyBody与数字人体模型软件EMA之间建立接口,以生物力学数据丰富人体工学评估。并设计若干体力劳动实验,使用 诺亦腾PN惯性动捕设备采集动作数据,以验证该接口的有效性。

原文链接:https://link.springer.com/chapter/10.1007/978-3-030-02053-8_134
03 动捕设备监测建筑工人疲劳状态
加拿大 滑铁卢大学
Lichen Zhang,Mohsen Mutasem Diraneyya, JuHyeong Ryu,Carl T. Haas,Eihab Abdel-Rahman
建筑工人在日常工作中需长时间、高负荷进行体力劳动,随之而来的肌肉疲劳是造成工人工伤事故与慢性职业病的重要因素之一。监测工人疲劳程度,及时安排休息,有助于减轻此类风险。本文作者提出一种将 诺亦腾PN惯性动捕设备与机器学习方法相结合的工人疲劳状态监测方案,并请到6位专业建筑工人进行实验。诺亦腾PN采集6名专业建筑工人在两个砌砖任务中的动作数据,机器学习方法可分析工人动作的抖动值以监测疲劳程度,两个任务的监测准确率分别达到了94%与80%,从而验证了该方案的可行性。

人工服务热线
工作日 9:00 - 18:00
售前咨询:+86 400-107-8298 转1
售后服务:+86 400-107-8298 转2

诺亦腾微信服务号
售前咨询:400-107-8298 转1
售后咨询:400-107-8298 转2









微信搜索:
NoitomService
关注诺亦腾售后服务公众号

微信搜索:
NoitomTech
关注诺亦腾品牌订阅号