人工服务热线
工作日 9:00 - 18:00
售前咨询:400-107-8298 转1
售后服务:400-107-8298 转2

诺亦腾微信服务号
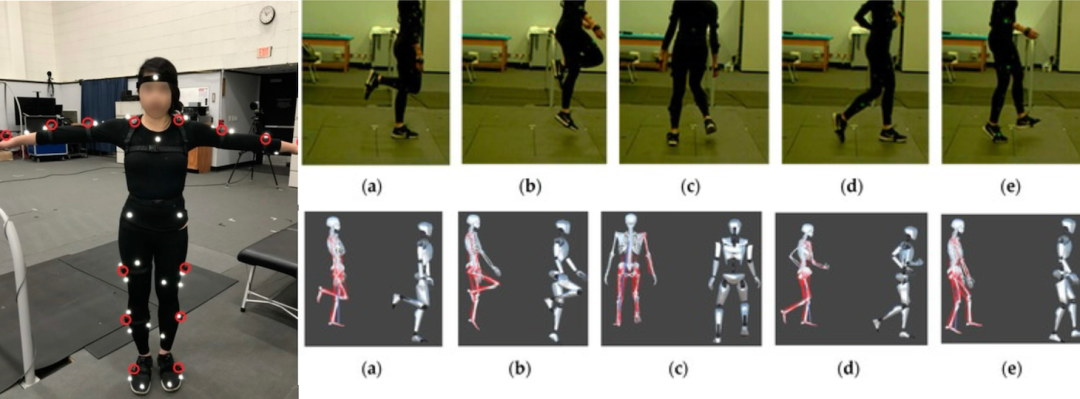
美国 加州大学长滩分校Elliot Recinos, John Abella, Shayan Riyaz, Emel Demircan
地面反作用力(Ground Reaction Force, GRF)是指人体与地面相互作用而产生的力,是评估体育运动受伤风险重要参数,准确测量和分析GRF可为运动员提供有效的运动健康指导。本文作者提出一个基于诺亦腾PN Pro惯性传感器与生物力学模型的GRF估计方法,作者运用该方法对单腿支撑、单腿跳跃、侧向跳跃、慢跑等运动过程的GRF进行估计,并与传统测量方法相比较,验证其可行性。同时,该方法有效避免了仪表跑步机、负荷传感器和压力传感器等传统GRF测量方法的测量区域受限、携带不便等缺点。
Tse-Yu Pan, Chen-Yuan Chang, Wan-Lun Tsai, Min-Chun Hu
新手裁判需在多场真实比赛中锻炼反应能力、熟悉官方裁判手势(Official Referee Signals),才能成为专业裁判。然而,裁判岗位非常稀少,且大部分球队不接受新手裁判。因此新手裁判实践机会极少。本文作者采用诺亦腾PN惯性动捕系统及机器学习方法,针对篮球比赛打造出一个ORS实训系统。学员穿戴诺亦腾PN观看比赛视频并做出判罚手势,系统将诺亦腾PN实时采集的动作数据与内置判罚手势相对比,检测判罚正确率,从而为新手裁判提供更多实践机会。作者请到10名实验参与者进行测试,系统对65个ORS检测准确率达95.3%。

阿尔托大学 Vähämäki, Joni
在攀岩运动员训练时,实时分析其动作并给予改进反馈,可有效提高训练质量。然而,分析与反馈的前提是实现攀岩动作的精确跟踪,且深度相机(depth camera)在室内攀岩场景下精确度较低。本文作者使用机器学习方法,利用诺亦腾PN惯性动捕系统采集的攀岩运动员动作数据,选择Offset Joint Regression模型估计人体姿态,完成对深度相机算法的优化,提高室内攀岩姿势的估计准确度,使其可推断骨骼关节的位置,结果表明,所选模型适用于估计攀爬姿势。

人工服务热线
工作日 9:00 - 18:00
售前咨询:+86 400-107-8298 转1
售后服务:+86 400-107-8298 转2

诺亦腾微信服务号
售前咨询:400-107-8298 转1
售后咨询:400-107-8298 转2









微信搜索:
NoitomService
关注诺亦腾售后服务公众号

微信搜索:
NoitomTech
关注诺亦腾品牌订阅号