人工服务热线
工作日 9:00 - 18:00
售前咨询:400-107-8298 转1
售后服务:400-107-8298 转2

诺亦腾微信服务号
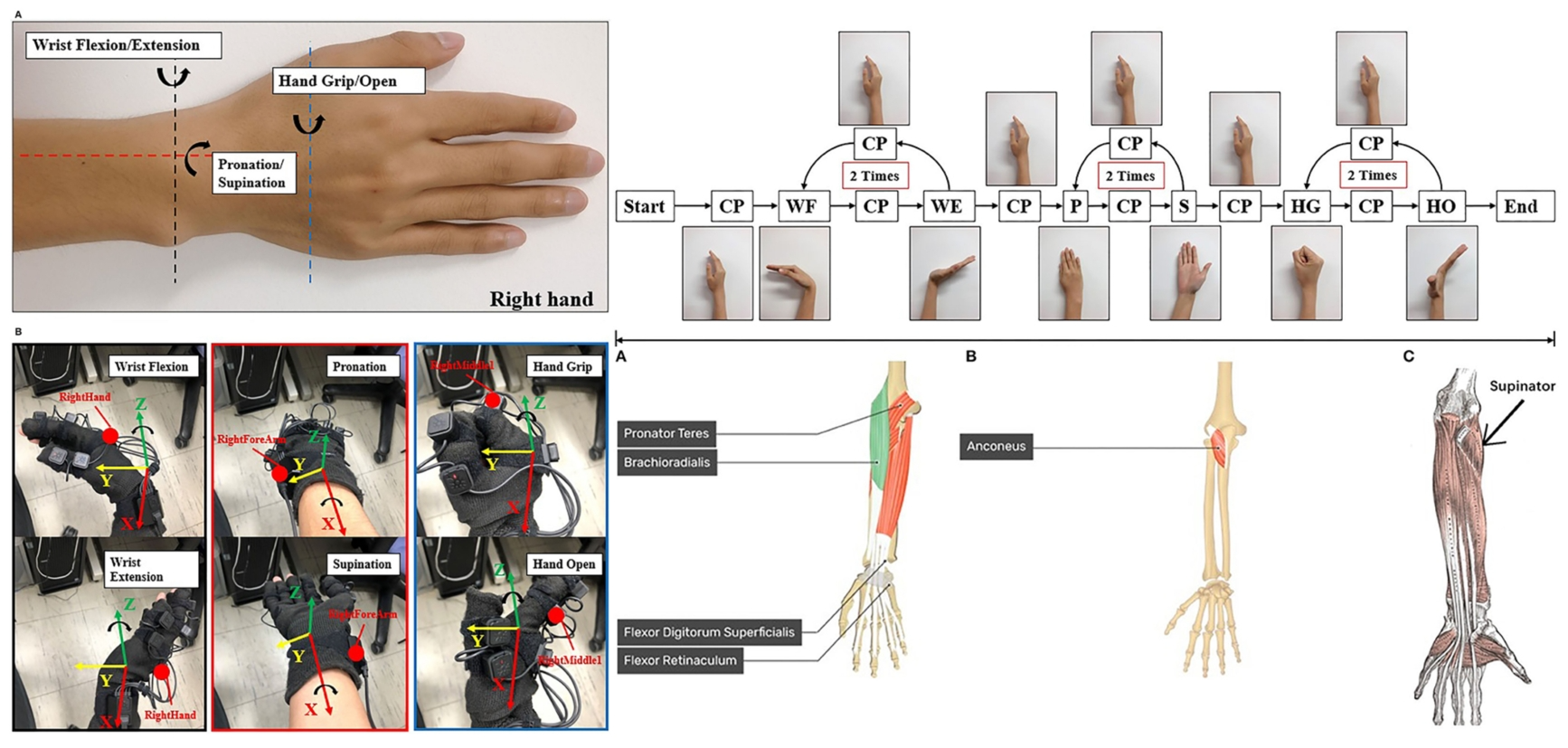
准确估计前臂运动的多关节角度对医疗康复、人机交互和运动控制等领域具有重要意义,本研究旨在使用回归模型准确估计前臂运动的多关节角度。作者选用诺亦腾PN惯性动捕套装,捕捉与记录参与者在执行特定动作时,右手和右前臂的关节角度信息。实验结果表明了使用回归模型准确估计前臂运动多关节角度的可行性。这项研究的成果不仅可用于假肢的实时控制,还有望在医疗康复、运动控制和人机交互等领域得到广泛应用。
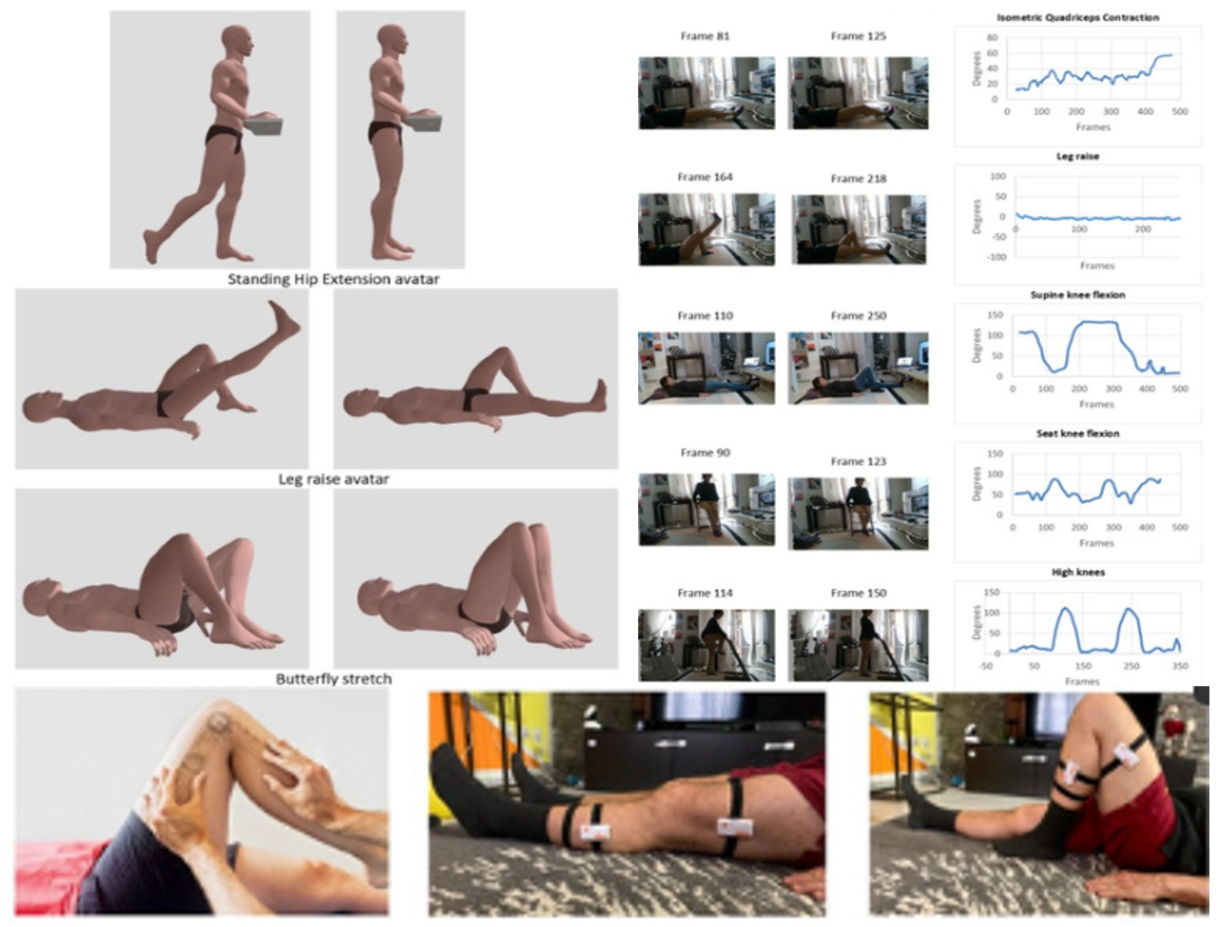
本文介绍了一种基于3D深度数据,计算下肢关节的旋转角度的方式,用于膝关节置换(TKA)和髋关节置换(THA)术后康复过程中关节角度的范围估计。作者利用诺亦腾PN惯性动捕系统,获取人体运动信息,结合计算机视觉和图像处理技术,实现对髋关节和膝关节角度范围的准确测量。该方法可以在非正面姿势下实现稳健的姿势估计,提供精确的关节角度,且设备可安装在家庭环境中,患者经过简短的培训后即可操作。通过监测患者在家庭康复过程中的关节活动情况,该方法为医疗人员提供重要的参考依据,有助于优化康复计划和提高治疗效果。
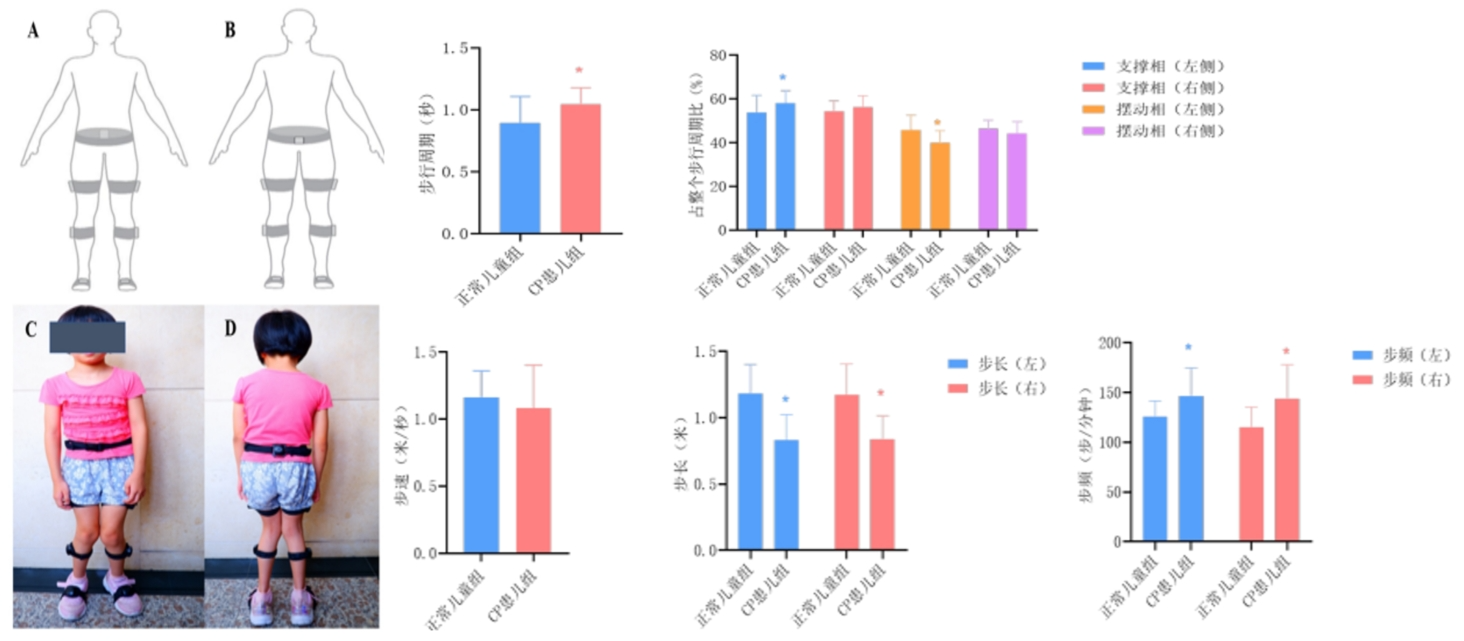
脑性瘫痪是导致儿童肢体残疾最常见的原因之一,其中痉挛型双瘫约占总数的37%,主要表现为双下肢功能障碍,严重影响患儿的日常社会生活。然而,如果不准确了解脑性瘫痪患儿的步态特征,将难以制定有效的康复计划。作者利用诺亦腾动捕设备,监测和分析患儿和同龄正常儿童在日常生活环境中以自然步速行走时的步态特征,以期为脑性瘫痪患儿的步态评估提供新方法和科学依据。通过该方法,可以更全面、准确地评估痉挛型脑瘫患儿的步态,并为康复治疗提供有价值的信息。
人工服务热线
工作日 9:00 - 18:00
售前咨询:+86 400-107-8298 转1
售后服务:+86 400-107-8298 转2

诺亦腾微信服务号
售前咨询:400-107-8298 转1
售后咨询:400-107-8298 转2









微信搜索:
NoitomService
关注诺亦腾售后服务公众号

微信搜索:
NoitomTech
关注诺亦腾品牌订阅号