人工服务热线
工作日 9:00 - 18:00
售前咨询:400-107-8298 转1
售后服务:400-107-8298 转2

诺亦腾微信服务号
01 开发装配和动作捕捉技术以简化3D动画
佛罗里达海湾海岸大学艺术与科学学院 鲍尔音乐与艺术学院
Angela Humphrey, Joseph Adams, Rama Hoetzlein
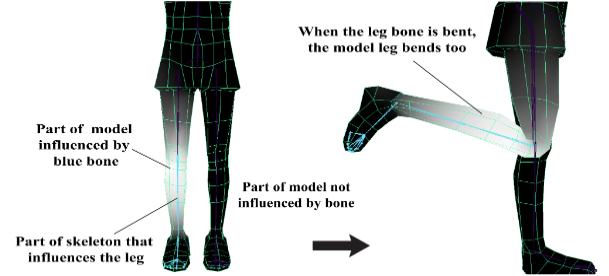
该项目重点是通过简化装配过程和使用动作捕捉数据,找到简化三维动画的方法。装配是一种为三维模型创建 "骨架 "的方法,以便进行操作和制作动画,而动作捕捉则是使用记录的动作来制作电影和视频游戏中三维角色的动画。
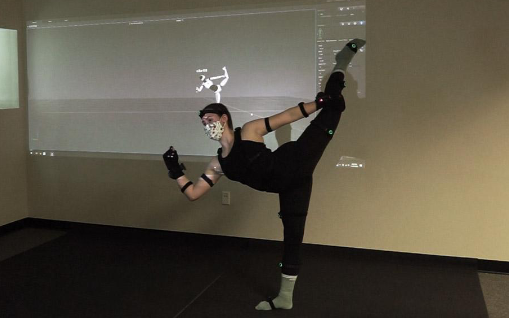
以往的方法,如手动装配和关键帧动画,对于动画新手来说既耗时又难学。为寻求一种更快的方法能够在一个学期内传授初学者三维动画,作者使用诺亦腾PN惯性动捕设备,通过使用更高效的装配流程和多个动作捕捉源,创建了一个在线库,其中包含可用于动作的三维角色装配和各种预捕捉动画。初学者可以在五分钟内制作出装备动画,佛罗里达海湾海岸大学的第一门三维动画课程就是使用了该装备动画。
原文链接(请复制至浏览器):
https://www.fgcu.edu/aquila/repository/developing_techniques_for_rigging_and_motion_capture_to_simplify_3d_animation.pdf
02 爪哇王子的三维数字化形象构建
印度尼西亚万隆理工学院艺术与设计系
Harry Nuriman, Nia Kurniasih
Setiawan Sabana, Intan R. Mutiaz, Rikrik K. Andryanto
著名的爪哇王子Diponegoro的形象出现在各种媒体,包括素描,绘画,雕塑,纸币和硬币,皮影戏,邮票,戏剧表演和电子设备。本研究使用了诺亦腾PN惯性动捕设备,在三维动画可视化使用的动作捕捉技术,以实现王子形象三维数字化形象的构建。

该项目采用互文性作为数据插值的方法,语言文本中所包含的物理特征、手势和副语言元素都是使用基于Babad Diponegoro中所写事件的运动捕捉数据。通过运用惯性动捕设备的数字化,以产生一个更准确、更生动的人物形象,从而获得了令人满意的整体可视化。
原文链接(请复制至浏览器):
https://www.fgcu.edu/aquila/repository/developing_techniques_for_rigging_and_motion_capture_to_simplify_3d_animation.pdf
03 VR环境下全身错觉延迟视觉反馈的影响
明治大学 大学院理工学研究科
大塚 一輝、嶋田 総太郎
关键词:身体所有感、运动主体感、全身错觉
本研究利用诺亦腾动作捕捉、虚拟现实相关设备,对VR空间上的人形虚拟形象的全身体错觉进行了调查。
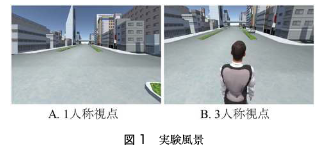
受访者一边看着阿凡达在街上向前推进的VR影像,一边当场踏步。此时,服装和被实验者是相同视点的1人称视点和稍微从后上方看虚拟形象的3人称视点,虚拟形象的身体动作和被实验者动作一致的同步条件和种族动作比被实验者延识400ms或700ms的非同步条件。在各自的组合(视点x同步条件)下进行了实验。其结果,与视点无关,如果动作同步则会产生运动主体感,但身体所有感只有在1人称视点同步时才会发生。该结果对使用VR进行自我投射的应用程序提供了重要的见解。
原文链接(请复制至浏览器):
https://cir.nii.ac.jp/crid/1390570543474159744
人工服务热线
工作日 9:00 - 18:00
售前咨询:+86 400-107-8298 转1
售后服务:+86 400-107-8298 转2

诺亦腾微信服务号
售前咨询:400-107-8298 转1
售后咨询:400-107-8298 转2









微信搜索:
NoitomService
关注诺亦腾售后服务公众号

微信搜索:
NoitomTech
关注诺亦腾品牌订阅号