人工服务热线
工作日 9:00 - 18:00
售前咨询:400-107-8298 转1
售后服务:400-107-8298 转2

诺亦腾微信服务号
01
动作捕捉技术在舞蹈创作中的应用表现
北京舞蹈学院、中国传媒大学 动画与数字艺术学院
Wu Zhen、Lian Luan
随着科技的进步,运动捕捉技术从最初只能捕捉到一个粗略的身体动作范围,发展到如今可以灵敏地捕捉整个身体运动。在科技与艺术相结合的今天,动作捕捉技术已成为舞蹈表演领域的创新工具之一,为艺术家提供了更多创作的可能性。
本研究基于诺亦腾惯性动作捕捉与虚拟现实技术的结合,让舞蹈创作有更多发挥的空间。
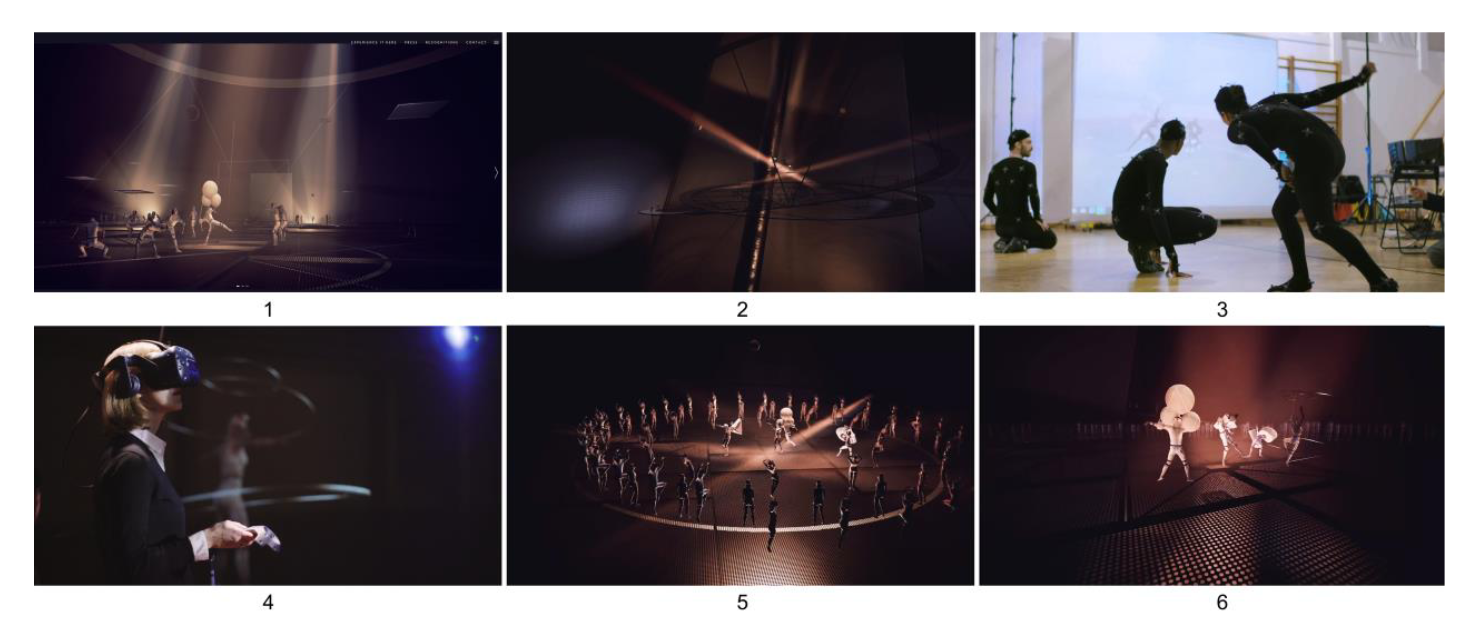
1、自由选择观看角度和移动位置: 观众在虚拟现实舞蹈剧场中可以根据个人喜好自由选择不同的观看角度和移动位置。这提供了比传统现场舞蹈表演更高程度的自由度,增强了观众的参与感和沉浸感。
2、张力感和沉浸感: 虚拟现实舞蹈剧场通过虚拟现实技术创造出逼真的环境和视觉效果来实现虚拟空间,使观众能够更深度地体验舞蹈表演,呈现出更强的张力感和沉浸感。
3、连接不同地理空间的表演者和观众: 该舞蹈剧场通过虚拟现实技术实现了连接不同地理空间的舞蹈表演者和观众。这意味着观众可以在不同地点,甚至是全球范围内欣赏到虚拟表演。
4、虚拟表演场地的构建: 在研究中,通过构建虚拟的表演场地,与物理世界中的真实剧场表演并行。这可能包括在虚拟现实中建立虚拟舞台、舞蹈演员的虚拟形象以及与之相关的视觉元素。
这样的虚拟现实舞蹈剧场不仅为观众提供了更丰富的观赏体验,同时也打破了地理限制,使舞蹈表演可以跨越不同的地方和空间进行呈现。这样的创新在推动舞蹈艺术和虚拟现实技术的交汇方面具有潜在的影响。
原文链接(请复制至浏览器)
https://iopscience.iop.org/article/10.1088/1742-6596/1828/1/012097
02
基于深度学习的机器人智能化运动捕捉示教系统
早稲田大学理工学術院、産業技術総合研究所
大山知理、鈴木彼方、陽品駒、尾形哲也
本研究旨在报告一种用于人形机器人动作学习的远程操作动作示教系统。
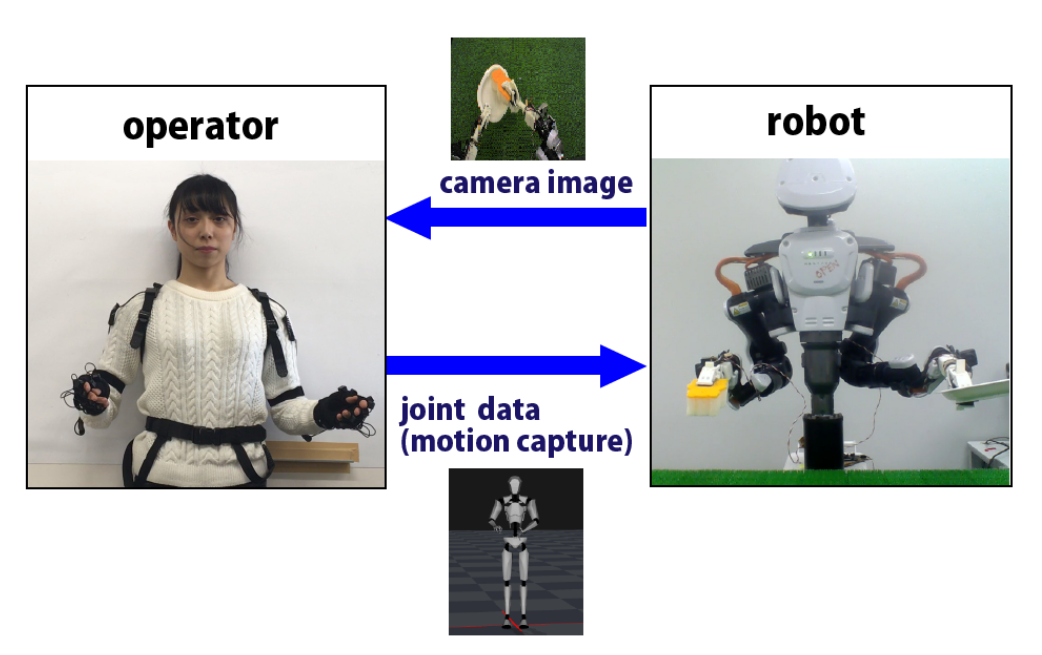
传统上,使用末端扭矩传感器进行直接教学是机器人动作指导的常见方式,但使用这种方式难以简单地教导涉及图像输入的复杂动作。因此,我们通过使用诺亦腾惯性动作捕捉系统和虚拟现实相关技术,使人能够直观地远程操作机器人,从而有效地尝试复杂的动作,并将此过程中的图像数据和关节数据作为深度学习模型的教示数据。将提出的系统引入到Nextage机器人中,验证了能够学习通过双臂协调执行物体操作任务。
原文链接(请复制至浏览器)
https://cir.nii.ac.jp/crid/1050292572130113280
人工服务热线
工作日 9:00 - 18:00
售前咨询:+86 400-107-8298 转1
售后服务:+86 400-107-8298 转2

诺亦腾微信服务号
售前咨询:400-107-8298 转1
售后咨询:400-107-8298 转2









微信搜索:
NoitomService
关注诺亦腾售后服务公众号

微信搜索:
NoitomTech
关注诺亦腾品牌订阅号