人工服务热线
工作日 9:00 - 18:00
售前咨询:400-107-8298 转1
售后服务:400-107-8298 转2

诺亦腾微信服务号
随着工业机器人在汽车、电子等领域广泛应用,对其工作性能的要求也逐渐提高。定位精度成为评估机器人性能的主要指标,尤其对于离线编程的机器人,由于仿真环境和真实环境之间存在差异,确保绝对定位精度的精准控制至关重要。
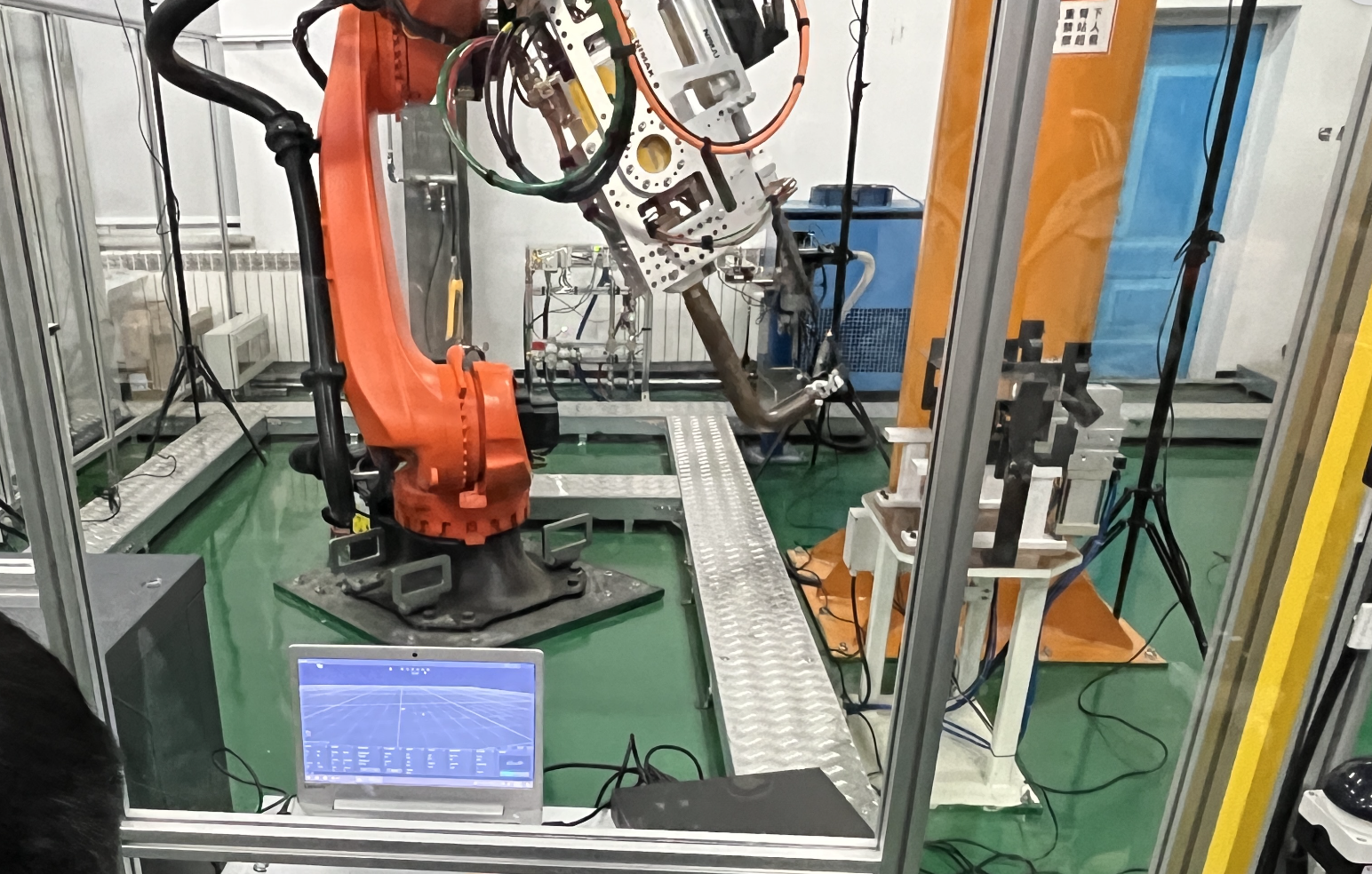
在这一背景下,长春理工大学机械工程实验教学中心(国家级实验教学示范中心)副主任 张乂文 老师率领团队,依托诺亦腾光学追踪系统进行焊接机器人末端姿态数据的采集。
在这项工作中,他们旨在获取更为精准的位姿信息,提升焊接过程的准确性和效率。这不仅对工业机械臂在实际应用中具有重要意义,同时也为相关研究提供了可靠的数据支持。
01
精准应用光学追踪
机械臂位姿信息新视野
工业机器人的本体标定,分为运动学建模、数据测量、参数辨识与误差补偿四个步骤。在姿态数据测量中,测量设备的精度直接关系到准确性。诺亦腾光学追踪系统为机械臂提供了高精度和实时性的感知能力,使其能够在复杂环境中高效地工作。

张乂文老师指出,诺亦腾光学追踪系统解决了传统测量方法的问题,如三坐标测量仪和经纬仪精确但仅适用于静态条件,而球杆仪和激光跟踪仪较为繁琐等。这有助于确保工业机器人在离线编程后在真实环境中能够达到所需的绝对定位精度水平,提高其在生产和制造中的应用效能。
光学追踪系统定位精度高、工作空间大,而且无需接触测量,在得到机械臂未端位姿的数据测量值后,通过计算,实时获得其位姿信息。
此外,通过光捕设备捕获机械臂的运动轨迹信息,进行机械臂运动学模型的参数识别,并对其控制器中的名义连杆参数进行修正,实现误差补偿,完成本体标定。随后进行轨迹优化算法的研究,优化机械臂的运动路径和动作规划,提高生产效率。
02
广泛应用
普适高效 多领域赋能
诺亦腾在精准光学定位的基础上,加入了自身深厚底蕴的惯性技术,独创混合追踪和数据融合的算法,实现对物体位置以及姿态的高精度追踪,提供高频率、低延迟的六自由度(6DoF)位姿数据。
诺亦腾光学追踪定位系统
该产品具有抗遮挡,普适性强、学习成本低等特点,相较于传统方案,该解决方案鲁棒性更高易用性更强。可应用在离线编程的精确性提升、虚拟环境仿真、工作单元的姿态校准、碰撞检测和避免、路径规划的优化、教学和培训等领域。
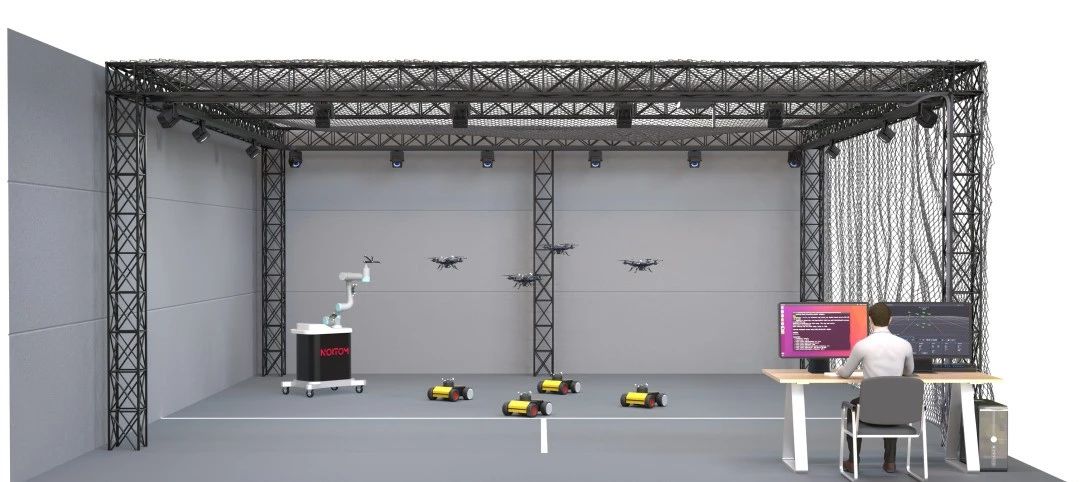
张乂文老师还提到,“团队下一步计划在实验室内搭建光捕环境,利用光学追踪技术,对无人车的位姿和轨迹进行捕捉。通过获取无人车的精确位置坐标,将这些坐标作为控制系统的反馈信号,对无人车的行进位置等信息进行纠正,实现对无人车的精确控制。”
人工服务热线
工作日 9:00 - 18:00
售前咨询:+86 400-107-8298 转1
售后服务:+86 400-107-8298 转2

诺亦腾微信服务号
售前咨询:400-107-8298 转1
售后咨询:400-107-8298 转2









微信搜索:
NoitomService
关注诺亦腾售后服务公众号

微信搜索:
NoitomTech
关注诺亦腾品牌订阅号